















Alle produkter
Købes oftest
Meest gekocht
Bedst bedømte produkter
Best beoordeelde producten
Rådgiver
Teksten forneden er maskineoversat fra den tyske originaltekst.
Værd at vide om modelfremstilling af elektronik
Hvad er modelskabende elektronik?
Hvad laver fjernbetjeninger til modeller?
Hvad er modeller til servostyring?
Hvad er modelbygningskontrollere?
Hvad er modelbygning af elektroniske komponenter?
Hvilke batterier og hvilken opladningsteknologi er velegnet til modelfremstilling?
Hvad er FPV?
Hvad er modelskabende elektronik?

Modelbyggere, der bygger smukke stående modeller med stor opmærksomhed på detaljer, som efter færdiggørelsen er godt beskyttet mod støv og hård håndtering i stærkt oplyste udstillingsvinduer, behøver ikke nogen elektronik til modelfremstilling. Men når en model skal udstyres med lys, eller hvis enkelte dele skal bevæge sig eller dreje tro mod originalen, bliver tingene mere interessante. Senest, når den færdige model skal styres af radio, kommer modelbygningselektronikken i spil.
For nu skal de mest forskellige styre-, kontrol- og koblingsfunktioner implementeres pålideligt. Der kræves korrekte højteknologiske komponenter til dette, som også skal være korrekt installeret, professionelt forbundet og perfekt justeret.
Enhver, der nogensinde har været heldig nok til at kigge ind i en omhyggeligt bygget skibsmodel, en prototypisk helikopter eller en lastbil eller jetmodel ved hvad der menes.
Men det er netop denne kombination af afprøvet modelkonstruktion og moderne elektronik, der er grunden til, at så mange mennesker er interesserede i RC-modelkonstruktion (radiostyret = fjernstyret).
Hvad laver fjernbetjeninger til modeller?

Uanset om du er skibsmodelbygger, bilmodelbygger, flyvemodelbygger eller i funktionel modelbygning: Så snart en model skal flyttes tro mod originalen, kommer fjernbetjeningsteknologi i spil. Og det er netop på dette område, at udviklingen har gjort enorme fremskridt i de senere år.
Hvilket drama var det for nogen tid siden, hvor kun frekvensområdet 27, 35 eller 40 MHz var tilgængeligt til styring af modeller. Ud over frekvensinterferensen forårsaget af CB-radioer, der var udbredt på det tidspunkt, brød mange modeller også på grund af den dobbelte tildeling af senderkanaler. Mange modelproducenter måtte bevise en meget høj smertetærskel her for ikke at miste interessen for hobbyen. Men til glæde for mange modelbyggere er denne katastrofe nu endelig forbi.
Den nye fjernbetjeningsteknologi med 2,4 GHz
Med frigivelsen af 2,4 GHz frekvensbåndet og tilgængeligheden af sofistikeret transmission og modtagelsesteknologi fra WLAN-området var det kun et spørgsmål om tid, før denne smarte teknologi også blev brugt til modelfremstilling af fjernbetjeninger. Og introduktionen af den nye 2,4 GHz fjernbetjeningsteknologi løste ikke kun mange af de gamle problemer. Derudover er nogle nye og meget interessante præstationsfunktioner blevet muliggjort:
Højere transmissionssikkerhed
I modsætning til de gamle systemer, der sendes permanent på en fast kanal, springer de nye fjernbetjeninger frem og tilbage mellem kanalerne og optager kun en af de ca. 80 tilgængelige kanaler i en brøkdel af et sekund. Processen kendt som frekvenshopping har den store fordel, at kun minimal information går tabt, hvis en kanal forstyrres. Derudover understøtter nogle fjernbetjeninger LBT-funktionen (Listen Before Talk). Med denne funktion kontrollerer senderen først, om den nye kanal virkelig er fri, før den sender sin information til modtageren om frekvensen af denne kanal.
Bedre afbrydelse af interferens
Da modtageren er digitalt forbundet til senderen, reagerer modtageren kun på signalerne fra "dens" sender. Den parallelle betjening af flere sendere eller modeller i et lukket rum (f.eks. På en modelflyvebane eller i en modelbilsport) er ikke længere et problem med 2,4 GHz fjernbetjeninger.
Rettelse af transmissionsfejl
Ved at sende yderligere information har modtageren mulighed for at kontrollere det modtagne signal for korrekthed. Modtageren i modellen er således kun i stand til at sende korrekt kontrolinformation til servoer, controllere og elektroniske komponenter. Modellernes frygtede levetid på grund af funktionsfejl hører fortiden til.
Hurtig signal transmission
På grund af transmissionskanalernes større båndbredde transmitteres kontrolinformation med en større opløsning og ved en højere hastighed. I forbindelse med hurtige servoer er reflekslignende kontrolbevægelser, såsom dem, der kræves til styring af hurtige modelbiler, mulige i brøkdele af et sekund.
Nem antenneinstallation

Da antennerne på et 2,4 GHz fjernbetjeningssystem kun er ca. 3 cm lange, kan de lettere "skjules" i modellen. Især prototypiske modeller opgraderes betydeligt, hvis ingen lange antennekabler ødelægger udseendet. Derudover gør den korte senderantenne det lettere at håndtere fjernbetjeningen. Der er ikke længere nogen udtrækkelige teleskopiske antenner, der har tendens til at bøje eller bryde.
Brug af en returkanal
Fjernbetjeninger af modelkonstruktion af høj kvalitet transmitterer ikke kun styresignaler fra senderen til modtageren i modellen. Information fra modellen overføres tilbage til fjernbetjeningen via returkanalen. I forbindelse med de relevante telemetri-sensorer kan senderens display vise styrken og kvaliteten af modtagerens signal, modtagerbatteriets spænding, motortemperaturen eller højden eller lufthastigheden.
Selvfølgelig er der også en bred vifte af 2,4 GHz fjernbetjeninger, der dækker hele spektret af mulige anvendelser. Tilbuddet spænder fra enkel 2-kanals drejeknap-fjernbetjening til bilmodeller til billige 4-kanals håndholdte fjernbetjeningssystemer til fuldt udstyrede håndholdte eller konsoltransmittere, hvormed helikoptere, jetfly og syndigt dyre store modeller kan styres.

Modtager med yderligere funktioner
Da flere 2,4 GHz-modtagere kan betjenes eller linkes til en 2,4 GHz-sender, bruger mange modelbyggere naturligvis muligheden og bygger deres egen modtager i hver model.
For eksempel kan du skifte mellem modeller meget hurtigt på en modelflyveplads. Nogle af modtagerne er udstyret med to eller endda 4 modtagelsesniveauer, hver med sin egen antenne.
Dette har den fordel, at hver antenne kan dirigeres i en anden retning, og modellen har således perfekt modtagelse i enhver flyveposition eller i enhver kørselssituation.
Derudover "pakker" producenterne andre nyttige funktioner i modtagerne. En gyro-modtager har indbygget elektronik med positions- og accelerationssensorer, for eksempel for at holde en flyvemodel absolut stabil i enhver flyveposition. Pludselig sidevind ved landing kaster ikke længere modellen ud af sin flyvevej.
Hvad er modeller til servostyring?

Med en fjernbetjeningssender omdannes bevægelserne af kontrolpindene og kontakternes aktuelle positioner og drejeknap / glidekontrol til elektroniske signaler. Disse signaler er kodet (krypteret) og transmitteret til modellen via radio. I modellen skal de elektroniske kontroloplysninger modtages, afkodes og konverteres tilbage til en mekanisk bevægelse.
Modelleringsserver blev udviklet til at konvertere et styresignal til bevægelse. Udover elektronik indeholder servoer en lille motor, der driver en slidearm (krydsarm) via en gearkasse. Bevægelsen af armen er proportional med kontrolpinden. Hvis kontrolpinden er i midterposition, er servohåndtaget også i midterposition. Hvis kontrolpinden afbøjes, bevæger servohåndtaget sig samtidig i samme retning.
Hvad der teknisk set er let at gøre på sendersiden ved hjælp af potentiometre eller Hall-sensorer repræsenterer en langt større udfordring i modellen. Fordi modelbyggerne har en lang række krav til servoer i deres modeller:
højde og vægt
En servo skal matche modellen. Mange modelproducenter angiver derfor størrelsen på den servo, der skal bruges, når modellen designes gennem dimensionerne på servoinstallationsåbningen. Der er dog også modeller, hvor valget af servo er gratis, fordi de nødvendige servomonteringer eller servoaksler skal oprettes af modellereren selv. Af denne grund tilbydes servoer i en bred vifte af størrelser og designs.

Aktiveringsmoment og holdemoment
De næste vigtige kriterier for en servo er aktiveringsmomentet og holdemomentet. Dette betyder, hvor meget kraft en servo genererer til artikulation af årer eller styrestænger, og hvor meget kraft de afbøjede elementer holdes i deres position.
Da konventionelle servoer har et drejeligt monteret outputhåndtag og derfor er underlagt løftestangsloven, er værdierne angivet i Ncm. En servo med et aktiveringsmoment på 30 Ncm er i stand til at løfte en masse på ca. 3 kg, hvis drejepunktet er 1 cm væk fra servohåndtagets drejepunkt.
Aktiveringshastighed
Aktiveringshastigheden er et andet vigtigt kriterium, der adskiller servos af høj kvalitet. Jo mindre tid en servo har brug for at dreje fra det ene slutpunkt til det andet, jo bedre implementeres hurtige kontrolkommandoer af senderen. Men selvom z. Hvis der for eksempel anvendes elektroniske stabiliseringssystemer (gyroer) i modelhelikoptere, er det nødvendigt, at de servoer, der er forbundet med dem, kan reagere hurtigt og pålideligt på de kontrolimpulser, der genereres af gyroen.
Analog eller digital
En servo er forbundet til en modtager ved hjælp af et tre-leder kabel. Ud over forsyningsspændingen (plus og minus) transmitteres kontrolinformationen på den tredje ledning. For at gøre dette udsender modtageren en kontrolpuls 50 gange pr. Sekund eller hver 20 ms (millisekunder).
Det lyder ret hurtigt i starten. Det skal dog tages i betragtning, at indstillingsinformationen for senderens kontrolpinde og -afbrydere transmitteres efter hinanden, og derfor er pulsbredden kun 0,9 - 2,1 ms (servocenterposition = 1,5 ms) afhængigt af kontrolpindens position (se signal A i Kredsløbsdiagram 1). I den resterende tid (19,1 - 17,9 ms) modtager servoen ingen indstillingsoplysninger og har derfor ingen mulighed for at flytte servohåndtaget til den ønskede position eller holde den position, der er angivet af senderen.
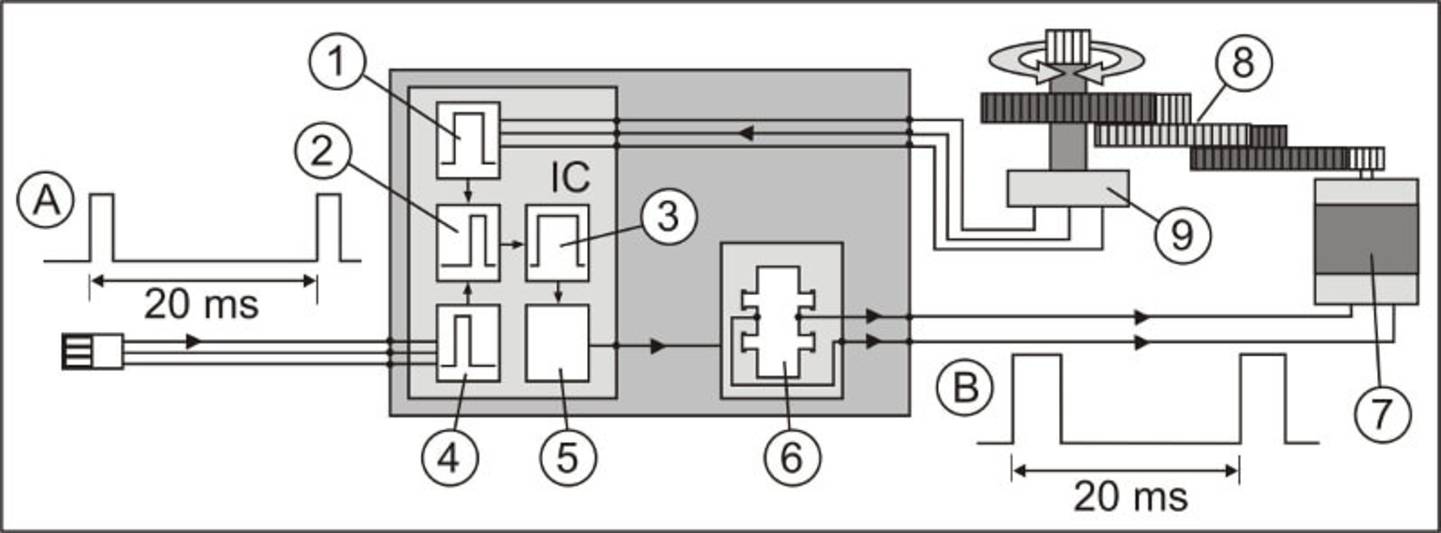
Kredsløbsdiagram 1: Struktur af en analog servo
- Referenceimpuls
- Differentialpuls
- Pulsbår
- Rx signal
- Kontrollogik
- Sluttrin
- Servomotor
- Servoudstyr
- Potentiometer
Kredsløbsdiagrammet 1 viser den skematiske struktur for en konventionel analog servo. Du kan tydeligt se, at servomotoren kun modtager en kontrolpuls i en periode på 20 ms (se signal B). Jo større servohåndtagets afvigelse fra den aktuelle til målpositionen er, jo bredere impulser motoren. Servohåndtagets aktuelle position (faktisk position) meddeles styreelektronikken via et potentiometer.
En digital servo er mekanisk struktureret som en analog servo. Imidlertid anvendes en mikroprocessor i stedet for de spændingsstyrede kontroltrin. Efter digitalisering og lagring af indstillingsoplysningerne fra modtageren kan processoren nu også styre servomotoren i pulspauserne (19,1 - 17,9 ms) for at bringe eller holde servohåndtaget i den ønskede position.
Dette betyder, at digitale servoer kører hurtigere, mere kraftfuldt og har enorme holdekræfter. Og da selv minimale afvigelser fra målpositionen justeres, er digitale servoer også meget mere nøjagtige. Imidlertid øger den hyppige aktivering af servoen også servokraftens behov.
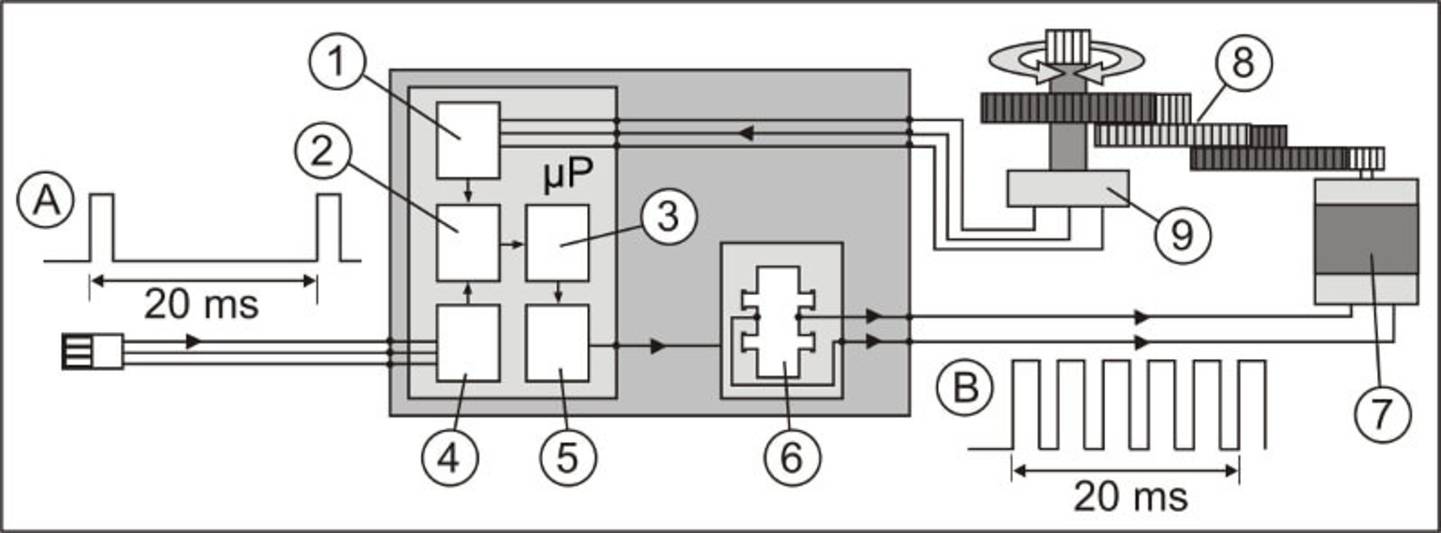
Kredsløbsdiagram 2: Struktur af en digital servo
- Analog-digital enhed
- Regel logaritme
- Pulsbreddegenerator
- Måling af pulsbredde
- Kontrollogik
- Sluttrin
- Servomotor
- Servoudstyr
- Potentiometer
Kredsløbsdiagrammet 2 viser den skematiske struktur for en digital servo. Du kan tydeligt se, at servomotoren modtager langt flere kontrolimpulser end den analoge servo i en periode på 20 ms (se signal B). Også her afhænger pulsbredden af servohåndtagets mål og faktiske position.
Vores praktiske tip
Hvis der bruges flere digitale servoer i en model, skal strømforsyningen altid tilpasses. Til dette formål skal der anvendes højstrømsbatterier og tilstrækkeligt dimensionerede kabler og stik. Med store og dyre modeller anvendes der nu intelligente batterikontakter, der forsyner hver servo med tilstrækkelig strøm. For at indstillingsoplysningerne også kan overføres til servoerne, har batteriunderstøtterne de nødvendige modtagerforbindelser.
Hvad er modelbygningskontrollere?

Ud over den mekaniske styring af årer eller styrestænger er det også nødvendigt at kunne påvirke motorer ved hjælp af fjernbetjeningen. Til dette formål er der motorstyringer eller hastighedsregulatorer, som styres på samme måde som en servo. Dette betyder: Motorens hastighed ændres afhængigt af placeringen af kontrolpinden på senderen.
Hastighedsregulator eller hastighedsregulator
Selvom der ofte bruges hastighedsregulatorer, er de ikke altid hastighedsregulatorer, men mest hastighedsregulatorer. Dette betyder: Hvis kontrolpinden til motorfunktionen er indstillet til 50% af den maksimale effekt på senderen, forsyner hastighedsregulatoren motoren i modellen med 50% af batteristrømmen. En hastighedsregulator kan ikke registrere eller påvirke, om motoren virkelig arbejder med 50% af dens effekt eller roterer hurtigere eller langsommere på grund af skiftende belastning.
En hastighedsregulator registrerer på den anden side motorens aktuelle hastighed og justerer automatisk motorens energi, hvis hastigheden stiger eller falder på grund af en belastningsændring. Denne kontroltilstand (Govener-tilstand) er vigtig for eksempel for elektriske modelhelikoptere, da de skal betjenes med en konstant rotorhastighed.
Børstet controller eller børsteløs controller
Når du vælger den relevante hastighedsregulator, skal motoren først tages i betragtning. Hvis motoren er en kollektormotor, hvor strømmen transmitteres til ankeret via to kulbørster (børste), skal der også anvendes en børstet regulator.
Børstede motorer har imidlertid mange ulemper. Kulbørsterne er slidte og skal serviceres eller udskiftes kontinuerligt. Når motoren kører, opstår den såkaldte børsteild på børsterne, hvilket kan føre til betydelig interferens, når der modtages fjernbetjeningssignaler.
Af denne grund har flere og flere børsteløse motorer etableret sig i modelfremstilling. Disse motorer fungerer som trefasemotorer, så de har også tre tilslutningskabler og kræver ikke kulbørster (børsteløs). Som et resultat kræver disse motorer specialdesignede børsteløse regulatorer.
Følgende figurer viser forskellene mellem de to motortyper:
Børstet model bilmotor

Beslagene til motorbørsterne, inklusive forbindelseskablet, er tydeligt synlige på den bageste lejeskærm.
Børsteløs model bilmotor

I modsætning til en børstet motor har børsteløse motorer tre i stedet for to tilslutningskabler.
Fartpilot eller flyveleder
I princippet betyder det ikke noget, hvilken model der driver en elektrisk motor, men afhængigt af hvilken model der kræves en hastighedsregulator / hastighedsregulator, har controllerne tilsvarende præstationsfunktioner.
Mens det giver en god mening i en bil- eller skibsmodel at kunne køre drivmotoren i begge retninger, sætter modelpiloter ikke rigtig pris på, at propellen på deres flymodel også kan dreje baglæns.
Her er en fornuftig bremsefunktion meget vigtigere, således at propellen til f.eks. Elektriske svæveflymodeller standser straks, når motoren slukkes og foldes rent tilbage. Hvis propellen fortsatte med at dreje som en vindmølle uden motordrev, ville modellen ikke være i stand til at overgå til en fornuftig svæveflyvning.
På den anden side har skibsmodellere brug for regulatorer eller hastighedsregulatorer, der kan køles med vand. Af denne grund tilbydes en bred vifte af controller-design.

Overhold tekniske data
Ved valg af hastighedsregulator / hastighedsregulator skal de tekniske data altid overholdes. Mens den maksimale strøm og den maksimale driftsspænding under ingen omstændigheder må overskrides, er specifikationen af motorviklingerne (drejninger *) for bilmodelregulatorer en minimumsværdi, der ikke må underskrides.
Da nogle af controllerne også beskytter f.eks. Lipo-batterier mod total afladning og kan tilpasses individuelt til den tilsluttede motor, skal producenten og programmeringsinstruktion overholdes under installationen.
Vores praktiske tip
* Da elforbruget hos modelbilmotorer varierer meget og altid afhænger af den aktuelle kørselssituation, vælger modelbilchauffører deres hastighedsregulator ikke i henhold til strømmen, men i henhold til antallet af motorviklinger "drejer". Jo lavere antallet af motorviklinger, jo højere er den strøm, som motoren kan absorbere. Derfor skal styreenheden være konstrueret således, at antallet af drejninger på den anvendte motor er identisk med eller større end antallet af drejninger, som controlleren kan håndtere.
Hvad er modelbygning af elektroniske komponenter?

Hvis en model skal udstyres med mere end bare køre- og styrefunktioner, kræves elektroniske moduler. Med disse moduler og lidt håndværksfærdighed er det så ret nemt at tænde og slukke for positionslys, forlygter, relæer eller andre forbrugere ved hjælp af fjernbetjeningen. Hvis der også kan høres en prototypisk motorlyd under motorhjelmen, er modellen i sin smukkeste form.
Den pålidelige strømforsyning af modellen via et batteriunderlag er også et meget vigtigt aspekt. For at forbedre driftssikkerheden for deres modeller bruger mange modelbyggere to batterier til at drive modtageren og servoerne. En batterikontakt overvåger derefter begge batteriers spændingsniveau og bruger altid batteriet med det højere spændingsniveau til at drive modellen. Hvis et batteri svigter med en teknisk defekt, kan det andet batteri stadig pålideligt forsyne modellen med energi.
Hvilke batterier og hvilken opladningsteknologi er velegnet til modelfremstilling?
Modelbyggere har ikke kun brug for at vide alt om deres model og den indbyggede elektronik. Modelbyggere kender også deres vej rundt, når det kommer til batterier og opladningsteknologi. Dette er også absolut nødvendigt, fordi genopladelige batterier forsyner modellerne med vital energi eller vital energi. Derfor lægger mange modelbyggere stor vægt på en pålidelig strømforsyning til deres modeller.

NiMH-batterier og batteripakker
Kommercielt tilgængelige NiMH runde cellebatterier, f.eks. I Mignon-design, bruges primært i indgangssæt til transmitterens strømforsyning. For modtagerens strømforsyning er svejsede batteripakker i en lang række designs det bedre valg.
Fordi med de vibrationer, som en model kontinuerligt udsættes for under drift, kan kontakterne i en batteribeholder hurtigt føre til afbrydelser eller løse kontakter.
Konsekvenserne af sådanne rystende kontakter er frafald i det modtagende system, hvilket kan føre til et totalt tab af kontrol. Et mareridt for enhver modelproducent.

Lithium-batterier
Inden for drevbatterier har lithiumpolymerbatterier (LiPo) længe overgået NiMH-batterier. Dette er ikke underligt, fordi LiPo-batterier er lettere og har en betydeligt højere energitæthed end NiMH-batterier.
Disse batterier ønsker imidlertid at blive håndteret korrekt. Udladning for dybt er lige så skadelig som overopladning. I ekstreme tilfælde kan batteriet ødelægges mekanisk med en akut risiko for brand og eksplosion.
Af denne grund er det vigtigt at indstille batteritypen og antallet af celler ved programmering af hastighedsregulatorer / controllere. Regulatorerne / aktuatorerne slukker derefter for motoren eller reducerer effekten, hvis der er risiko for total afladning.
For at være i stand til at overvåge hver enkelt celle under opladningsprocessen har LiPo-batterier specielle balancerforbindelser ud over tilslutningskablerne med høj strøm. Da nogle LiPo-batterier kun er dækket af folie, skal man også være opmærksom på, at spidse eller skarpe genstande ikke kan beskadige den ydre hud.
Hvis de håndteres korrekt, tilbyder LiPo-batterier dog langvarig kørsel og flyvende sjov.

Bly-batterier
Men enhver, der mener, at der ikke længere er brug for afprøvede blybatterier i en alder af lithiumbatterier og børsteløse motorer, tager fejl. Skibsmodelbyggere bruger gerne blybatterier, fordi de på den ene side har høj kapacitet og på den anden side også billige. Du har også brug for den høje vægt af batterierne, så prototypiske modelskibe har den rigtige vandposition.
Men fans af modeller med methanolforbrændingsmotorer bruger også gerne blybatterier. Én som strømforsyning til gløderøret eller som strømforsyning til den elektriske starter. Blygel-batterier anvendes fortrinsvis, fordi disse batterier er lækagesikre og kan betjenes i enhver position.
I nogle tilfælde bruges store blybatterier også til hurtigt at genoplade drev- eller flybatterier i åbne felter, hvor der ikke er nogen strømforbindelse tilgængelig.
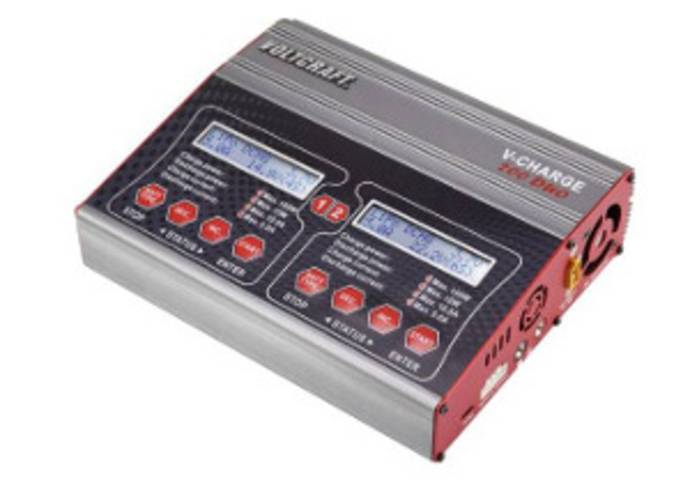
Opladere til modelbyggeri
I modsætning til standard runde celleopladere, der findes i enhver husstand, er modelopbygningsopladere kendetegnet ved, at de kan oplade batterier med flere celler. Desuden er opladerne designet, så de også kan oplade og aflade batterier med forskellige teknologier såsom NiCd, NiMH, LiPo, LiIon, LiFePO eller bly.
Men ikke nok med det! Mange modelbyggere bruger udskiftelige batterier for at kunne betjene deres model uden lange pauser i opladningen. I dette tilfælde er det nyttigt, hvis opladeren kan oplade to eller flere batterier på samme tid.
Og så batterierne hurtigt kan oplades, fungerer opladere nogle gange med meget høje opladningsstrømme. For at gøre dette skal selvfølgelig opladningskabler og stik passe perfekt til batterierne, ellers kan kontaktfejl og skader opstå meget hurtigt.
Da modelbyggerne bruger deres opladere lige derhjemme og på farten, har mange af enhederne en 12 V-forbindelse ud over en 230 V-forbindelse.
På denne måde kan køretøjets batteri fungere som en spændingskilde på farten. På den anden side har nogle klubhuse, der skal undvære en 230 V strømforbindelse, kraftige 12 V solsystemer, som opladere også kan tilsluttes. Opladere, der kun har en 12 V-forbindelse, betjenes simpelthen hjemme ved hjælp af kraftige 12 V-strømforsyninger.
Hvad er FPV?
Forkortelsen FPV står for First Person View og betyder i denne sammenhæng noget i retning af udsigten fra cockpittet på modellen. I princippet muliggør FPV, hvad modelbyggere har drømt om i mange år. Du kan nu se nøjagtigt, hvordan det ville være, hvis du selv kunne flyve din model, eller hvordan følelsen er, når du selv ser gennem forruden på din modelbil.
Til dette formål er der installeret små, lette og kraftige kameraer i modellen, som sender deres billedsignaler til en modtager via radio. Billederne kan derefter ses på en smartphone, tablet eller skærm.
Hvis modelpiloten derefter udelukkende vil styre sin model fra cockpitvisningen, har skærmbriller vist sig at være meget effektive. Det kræver dog en vis øvelse at vænne sig til det ukendte perspektiv. Først og fremmest er kopiere eller droner udstyret med kameraer, hvorved lovbestemmelser skal overholdes.
Juridiske krav til FPV-flyvning
Generelt må droner eller copters kun flyves inden for synsvidde. Dette betyder, at piloten ved senderen til enhver tid skal se sin drone. Som et resultat må han ikke flyve for langt væk, for ellers kan holdningen ikke identificeres tydeligt.
Brug af videobeskyttelsesbriller er kun tilladt, hvis flyvningerne foregår i en højde på 30 meter, og flyet ikke er tungere end 0,25 kg, eller en anden person konstant observerer det i syne og er i stand til at advare controlleren om farer for at henlede opmærksomheden. Dette tæller derefter som drift inden for førerens syn.
Premierklassen i FPV-flyvning
I mellemtiden har FPV-flyvning også etableret sig i racerscenen. Her bruges kraftige racecoptere til at flyve gennem parkeringshuse i et vanvittigt tempo eller til at tiltrække titusinder af besøgende til større racerbegivenheder på episke steder som Drone Champions League (DCL).